Research on Collaborative Simulation and Optimization of Flexible Disassembly Process for Retired Power Batteries
Description: This project is a sub-project under the National Key R&D Program of China titled “Key Technologies and Application Demonstration for Robotic Dismantling of New Energy Vehicle Batteries,”(国家重点研发计划项目“新能源汽车电池机器人化拆解关键技术与应用示范”) titled “Collaborative Simulation and Optimization Research on Flexible Dismantling Processes for Retired Power Batteries”(课题:退役动力电池柔性化拆解工艺协同仿真及优化研究)
Collaborator: Harbin Institute of Technology, Shenzhen, with Guangdong Jinsheng New Energy Co., Ltd. and KUKA Robotics (Guangdong) Co., Ltd.
People: Jian Chen, Zhenhan Zhang, Zekai Lin, Huiru Li, Hai Zhu, Yuanxin Cai
Academic collaborators: Prof. Yunjiang Lou
Generated by AI
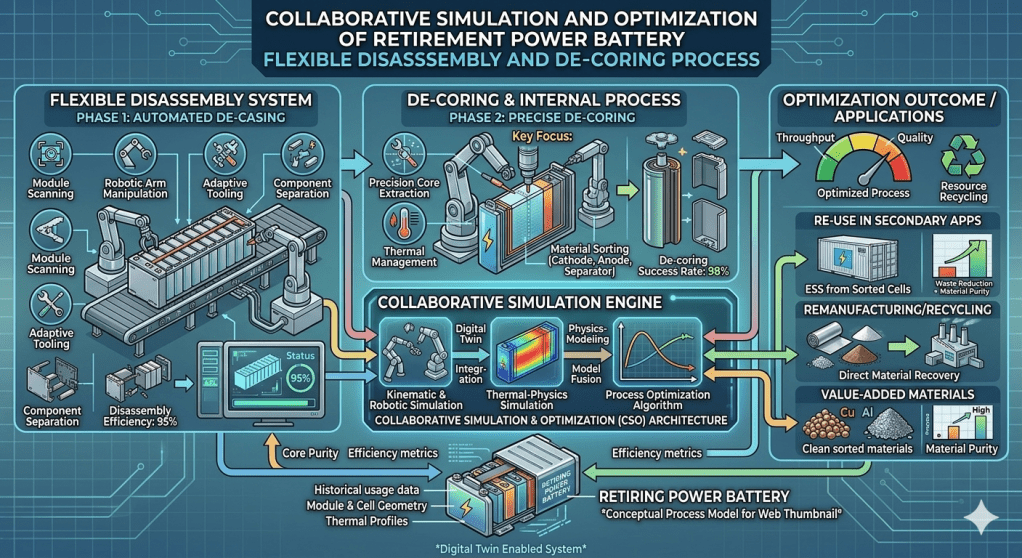
Objectives: The core objective of this project is to address the virtual simulation and value chain integration optimization challenges of decommissioned battery dismantling lines. Specifically, it aims to construct a production line digital twin capable of accurately reflecting physical entity behaviors (including a high-fidelity, high-precision flexible dismantling line digital twin), design optimal robotic dismantling strategies across the entire value chain, and establish a virtual-real collaborative interaction and solution verification mechanism, thereby supporting the simulation optimization of the overall production line.
Workpackage 1: Knowledge Graph Representation (知识图谱) for Assembly Structure and Dissemble Process of Retired Battery Packs
Workpackage 2: Digital Twin (数字孪生) and Simulation for Dissemble Lines of Retired Battery Packs

关键工艺仿真
Workpackage 3: Collaborative optimization considering multi-factors……
